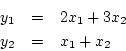
Matrix algebra provides a very convenient short hand for writing sets of equations. For example, the pair of simultaneous equations

 . This is very convenient notation compared with direct
substitution. The Mx structural equations are written in this general
form, i.e.,
. This is very convenient notation compared with direct
substitution. The Mx structural equations are written in this general
form, i.e.,
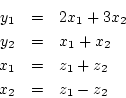
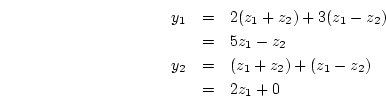
Real variables (y) = MatrixTo show the simplicity of the matrix notation, consider the following equations:hypothetical variables.
 , where
, where